Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124
Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124

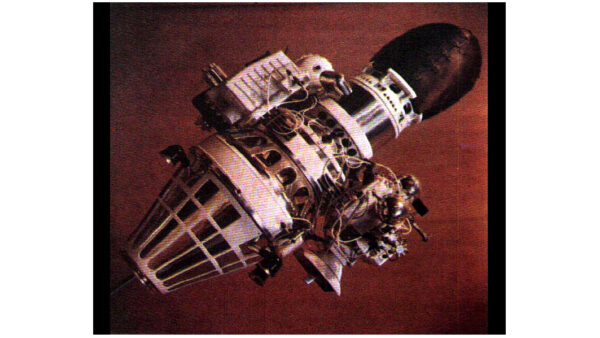
Os cientistas podem estar se aproximando do local de pouso há muito desaparecido da Luna 9 da União Soviética, o primeiro objeto feito pelo homem a pousar com segurança na Lua.
Em 3 de fevereiro de 1966, Lua 9 desceu ao Oceanus Procellarum, na borda oeste do lado da Lua voltado para a Terra, e transmitiu as primeiras imagens já capturadas da superfície de outro corpo celeste. Na época, os cientistas ainda estavam debatendo se a superfície do a lua pode ser muito mole para suportar um módulo de pouso ou futuros astronautas. As imagens enviadas pela Luna 9, revelando terreno sólido, ajudaram a resolver essa questão e abriram caminho para futuras missões.
Seis décadas depois, no entanto, o local exato de descanso da sonda permanece incerto. Lunar Reconnaissance Orbiter da NASA (LRO) mapeou quase toda a Lua com detalhes notáveis desde 2009. Mas a Luna 9 é minúscula – mais ou menos do tamanho de uma bola de praia – o que torna difícil distingui-la das rochas e sombras espalhadas pela superfície lunar.
Agora, duas equipes de pesquisa independentes dizem que podem ter restringido a localização da espaçonave.
O local candidato de uma equipe fica a cerca de 5 quilômetros das coordenadas oficiais de pouso da União Soviética para a missão. O outro fica a cerca de 25 km de distância. Mas aqueles coordenadas oficiais eram imprecisos, baseados em um método que estimava a posição da espaçonave medindo a direção do sinal de rádio proveniente de antenas na Terra. Essa técnica colocou a Luna 9 em algum lugar dentro de uma área de busca de aproximadamente 100 km de diâmetro.
Os pesquisadores dizem que as próximas imagens da Índia Chandrayaan-2 O orbitador – programado para passar sobre a região em março e equipado com uma câmera capaz de capturar vistas mais nítidas da superfície lunar do que a LRO – poderia ajudar a determinar qual localização está correta, se houver.
“Em seus viadutos, acredito que a câmera será um pouco melhor e captará mais com 2x a 4x a resolução e realmente obterá uma visão definitiva do local”, disse Lewis Pinault, pesquisador do Centro de Ciências Planetárias da University College London/Birkbeck, que liderou um dos esforços recentes, ao Space.com.
A chegada da Luna 9 à Lua foi muito diferente dos pousos lunares modernos. Ao se aproximar da superfície, uma cápsula esférica envolta em amortecedores infláveis foi ejetada da espaçonave e quicou várias vezes antes de parar. Ele desdobrou quatro painéis em forma de pétalas para estabilidade, como uma flor metálica, enquanto o estágio de descida mais pesado caía nas proximidades.
Essa sequência incomum de pouso pode ter deixado várias peças de hardware espalhadas por uma pequena área, que os pesquisadores estão agora tentando identificar a partir da órbita lunar.
Um local de pouso proposto foi identificado por Vitaly Egorov, um comunicador científico que dirige o blog Zelenyikot e há anos tenta rastrear Luna 9. Ele recentemente relançou a busca como pública, esforço de crowdsourcingarrecadando fundos e transmitindo ao vivo o processo para que os voluntários pudessem ajudar a vasculhar imagens orbitais em busca de pixels pequenos e anômalos que possam marcar o módulo de pouso.
Usando o LROC QuickMap, uma interface semelhante ao Google Street View para imagens LRO, ele comparou os panoramas de superfície originais de 1966 da Luna 9 com dados orbitais. Ao alinhar colinas distantes, pedregulhos e padrões distintos de material ejetado visíveis em ambos os conjuntos de dados, ele se concentrou em um local candidato a cerca de 15 milhas (25 km) das coordenadas relatadas na era soviética, de acordo com um Zelenyikot postagem no blog publicado em 7 de fevereiro.
Na mesma época, a equipe de Pinault abordou o mistério usando inteligência artificial.
Em um papel publicado em 21 de janeiro na revista npj Space Exploration, a equipe relatou um conjunto de características próximas à região de pouso historicamente relatada que pode corresponder à Luna 9 e ao hardware descartado durante sua descida.
Em vez de digitalizar manualmente milhões de imagens, os pesquisadores treinaram um modelo de aprendizado de máquina usando imagens LRO de Apolo locais de pouso, onde as localizações do hardware da espaçonave estão bem documentadas. Para testar o sistema, eles forneceram imagens inéditas do Apolo 17 local tirado com diferentes iluminação e ângulos de visão. O modelo detectou e localizou com sucesso o estágio de descida da Apollo 17 e também identificou de forma independente o local de pouso da Luna 16 em imagens LRO que não havia analisado anteriormente, informou o estudo.
Os pesquisadores então encarregaram o sistema de analisar imagens perto da região estimada de pouso da Luna 9. O algoritmo sinalizou um objeto principal a cerca de 3 milhas (5 km) das coordenadas relatadas, juntamente com várias características menores próximas separadas por menos de 650 pés (200 metros).
As mesmas características foram detectadas sob diferentes condições de iluminação – uma forte indicação de que o sistema estava isolando estruturas reais em vez de sombras ou artefatos de iluminação, observou o estudo.
“A máquina é incansável, certo?” Pinault disse Espaço.com em uma entrevista recente. “Ele pode olhar para muitas imagens e apenas fazer uma pausa e dizer: ‘Isso é diferente’.”
“No caso do foco atento de um ser humano”, acrescentou ele, “eu diria que os artefatos menores provavelmente teriam passado completamente despercebidos”.
O modelo pode detectar combinações sutis de perturbação do regolito, geometria de implantação e assinaturas de sombra que os observadores humanos podem não reconhecer conscientemente, disse Pinault. “A máquina está fazendo correlações que, pelo menos atualmente, não entendemos completamente”.
A equipe reconhece que o modelo – originalmente projetado para identificar micrometeoróides em fotografias – produziu falsos positivos, incluindo pelo menos um caso em que o “hardware” suspeito acabou por ser uma rocha. Mas os investigadores ajustaram deliberadamente o sistema para sinalizar candidatos promissores para análise humana, em vez de correrem o risco de perder provas subtis, observou o estudo.
Ambas as equipes esperam agora que a câmera do Chandrayaan-2 seja nítida o suficiente para identificar a cápsula da Luna 9 e também distinguir seus painéis em forma de pétalas.
Se novas imagens revelassem claramente essa forma, Pinault disse: “Eu levantaria a mão e diria: ‘Uau, ou alguém deixou cair um recorte de papelão para nos enganar, ou este é este grande artefato da história da exploração espacial da humanidade'”.
O próximo da NASA Ártemis 2 missão, no entanto, é pouco provável que ajude.
Artemis 2 realizará uma trajetória de estilingue em alta velocidade ao redor da Lua antes de retornar à Terra. Na aproximação mais próxima, os quatro astronautas a bordo da espaçonave Orion da missão passarão cerca de 3.700 a 4.300 milhas (6.000 a 7.000 km) acima da superfície lunar, que é muito mais alta do que as poucas centenas de quilômetros onde LRO ou Chandrayaan-2 orbitam.
Mesmo que Oceanus Procellarum gire e apareça no campo de visão – o que Pinault chamou de “um golpe de sorte” – a Artemis 2 estará muito distante para detectar um objeto tão pequeno como a Luna 9.
No longo prazo, a busca da Luna 9 assistida por IA oferece um vislumbre de como a inteligência artificial poderia ajudar a monitorar uma lua cada vez mais repleta de artefatos nas próximas décadas, disse Pinault.
Com a NASA Programa Ártemis e Os planos da China Para uma presença lunar de longo prazo e um número crescente de missões comerciais em todo o mundo rumo à Lua, a superfície lunar está acumulando mais hardware do que nunca. Sistemas de IA como o usado pela equipe de Pinault poderiam eventualmente operar diretamente a bordo de espaçonaves, identificando recursos lunares quase em tempo real, ajudando a catalogar e rastrear equipamentos de superfície e monitorando como foguete a exaustão e os impactos perturbam as partículas de regolito do tamanho de poeira da lua.
“Há boa ciência aqui”, disse Pinault.