Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124
Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124

Um veículo espacial transformador esférico construído no Japão, com apenas 8 centímetros de tamanho, passou com sucesso na Lua – e, ao fazê-lo, demonstrou navegação autônoma e comunicação sem fio com outro módulo de pouso que então retransmitiu dados de volta à Terra. O rover robótico, denominado SORA-Q em homenagem às palavras japonesas para “espaço” e “esfera”, tem como objetivo abrir caminho para mais robôs lunares autônomos em miniatura.
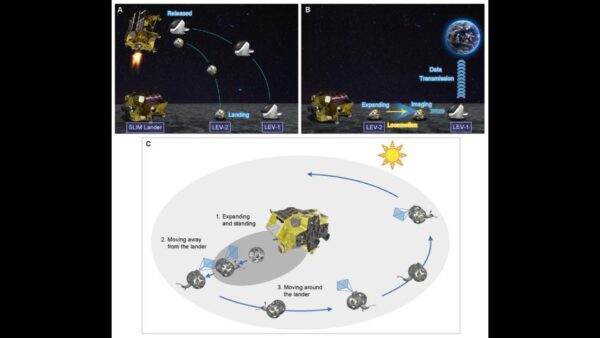
SORA-Q voou para o lua em dezembro de 2023 no Smart Lander da Agência Japonesa de Exploração Aeroespacial (JAXA) para investigação da lua (MAGRO) missão. Depois de algumas semanas em órbita, o SLIM pousou na superfície lunar em 19 de janeiro de 2024. Rapidamente, ele implantou o rover SORA-Q do tamanho de uma bola de tênis junto com outro robô – uma pequena máquina saltitante conhecida como Lunar Excursion Vehicle-1 (LEV-1). (SORA-Q foi designado LEV-2.) SLIM foi a primeira missão japonesa a pousar suavemente na lua.
O pequeno rover transformador SORA-Q foi desenvolvido em conjunto pela JAXA, Sony, Doshisha University e Takara-TOMY. Esta última, uma empresa de brinquedos, é co-proprietária da marca Transformers com a Hasbro e usou sua experiência e tecnologia desenvolvida a partir do design de brinquedos dos Autobots e Decepticons para dar à SORA-Q suas capacidades de transformação.
O SORA-Q transformou-se ao estender a sua forma de uma esfera para algo mais parecido com um cilindro, usando os hemisférios da sua forma esférica original como rodas. Uma câmera girou entre as rodas e uma cauda foi implantada para funcionar como estabilizador traseiro. O SORA-Q foi então capaz de contornar o módulo de pouso SLIM e tirar imagens coloridas do módulo de pouso e do ambiente lunar em seu local de pouso. SLIM pousou perto de uma cratera de 885 pés de largura (270 metros de largura) chamada Shioli, dentro de uma cratera maior de 61 milhas de largura (98 quilômetros de largura) chamada Cyrillus, que está localizada em Mare Nectaris, no lado lunar próximo.
Os veículos de excursão lunar foram projetados por uma equipe liderada por Daichi Hirano da JAXA. O objetivo era fornecer autonomia em um pacote pequeno, em vez de um grande rover que aumentaria a massa e o custo da carga útil e que seria incapaz de alcançar espaços apertados, como fendas.
No entanto, é necessário fazer concessões com rovers do tamanho da palma da mão, como o SORA-Q e o LEV-1, uma vez que nem tudo pode ser integrado neles. Assim, os dois pequenos robôs trabalharam em conjunto para explorar e retransmitir dados para a Terra.
A autonomia, neste caso, envolve a capacidade de chegar a destinos usando imagens de câmeras para contornar obstáculos como crateras e poços sem o envolvimento do controle da missão.
“Embora as capacidades de um pequeno rover individual sejam inerentemente limitadas, os resultados destacam o potencial de tais plataformas… como exploradores independentes, capazes de aceder a ambientes além do alcance de uma grande nave espacial primária”, escreveram Hirano e a sua equipa no seu artigo de investigação que descreve os resultados da missão.
As comunicações com os pequenos robôs cessaram após cerca de 100 minutos, 20 ou 30 minutos antes do tempo de vida esperado do SORA-Q. Hirano atribui esse fim prematuro à missão do rover como resultado de algo ter sido danificado no LEV-1 por seu movimento de salto ou pelo esgotamento da bateria do LEV-1, de qualquer forma impedindo que os dados fossem retransmitidos de volta à Terra.
Você pode ler um relatório completo sobre a missão SORA-Q em um artigo publicado na revista Robótica Científica.








